
人形机器人半马夺冠背后:自主导航与散热的双重挑战






大家好,我是卫明。近期人形机器人半马比赛的新闻引发热议,今天我们就来深入探讨这一话题。
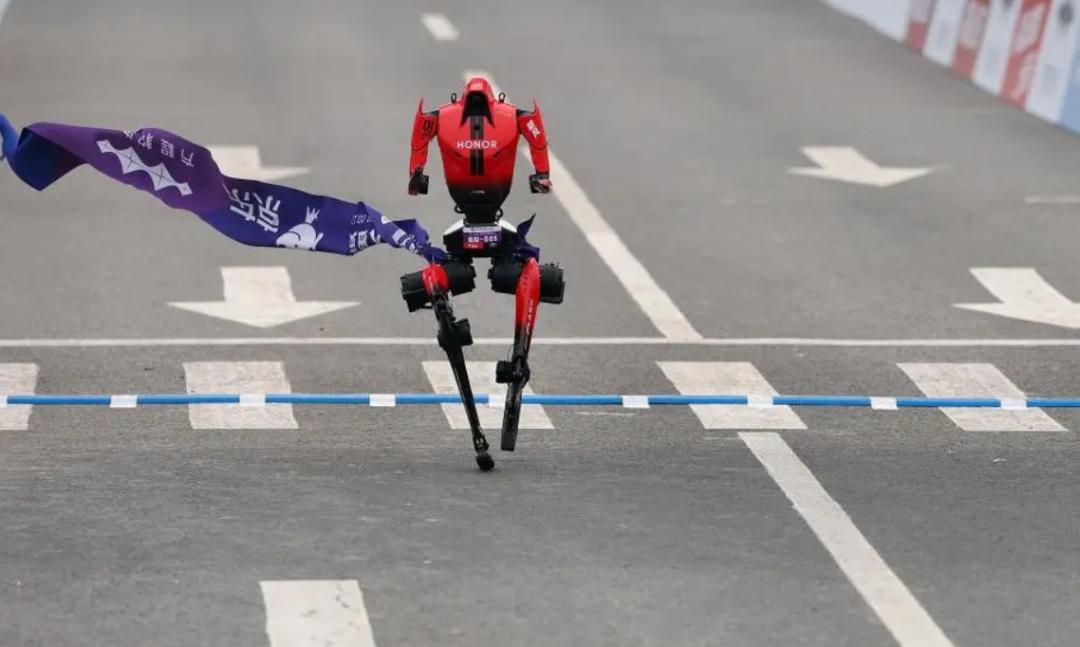
2026年4月19日,北京亦庄举办的人形机器人半马赛事中,深圳荣耀研发的“闪电”机器人以50分26秒完成21.0975公里赛程,成绩超越人类半马世界纪录,相关新闻迅速在社交媒体刷屏,“机器超越人类”的惊叹声不绝于耳。回想去年的机器人跑步比赛,多数参赛机器人跑不了多远就出现故障,短短大半年时间,技术进步确实显著。
不过,若浏览更多相关视频,会发现另一番景象:比赛途中,部分机器人需到路边接受维护,工作人员为其更换电池、背后倒入大量冰块,还得喷洒降温气雾剂才能继续比赛。虽然“闪电”创下了世界纪录,但所有参赛机器人都面临着“中暑”的风险。


这两种截然不同的画面,才是了解人形机器人真实发展状态的关键。
接下来,我们就聊聊人形机器人未来发展需要突破的两大瓶颈。
自主导航:38%占比背后的技术鸿沟
北京亦庄的这场人形机器人半马赛事,是目前全球规模最大、参赛队伍最多的同类赛事。2025年首届赛事仅有6支队伍完赛;到2026年,参赛队伍超100支,覆盖13个省份,规模化程度大幅提升。
最受关注的技术细节是,自主导航赛队占比达到38%——这是北京市人民政府赛前公布的数据,也是今年赛事规则升级的核心方向:自主导航赛队记录实时成绩,遥控操作赛队仅计趣味计时,规则明显向自主技术倾斜。
但“自主导航”在当下究竟意味着什么?
它与遥控操作之间的差距,远比想象中更大。
遥控操作本质上是人在控制回路中:操作员通过图传画面实时控制机器人的每个动作,机器人只是“带腿的显示器”。这种模式下,机器人的稳定性完全依赖人的反应速度——指令延迟几百毫秒,遇到障碍物只能等待操作员判断,“智能”无从谈起。

真正的自主导航,要求机器人在无人工干预的情况下,自主完成三维环境感知、实时路径规划、动态平衡控制,以及长距离运动中的能量管理和故障应对。这是对感知算法、运动控制、硬件可靠性的综合考验。

问题在于,今年这38%的“自主导航参赛队”,绝大多数仍处于半自主状态——机器人在相对稳定的直道可自主行走,遇到复杂地形、坡道或障碍物时,仍需后台人员随时介入。真正从起点到终点完全无需人工干预的情况,在今年赛场上极为罕见。
不过技术进步的轨迹清晰可见:2025年基本全是遥控操作,2026年38%实现自主,2027年这一数字极可能突破60%。原因在于,感知 - 规划 - 控制链路的核心算法每隔几个月就会更新迭代,算力芯片的进步也让实时推理成为可能。
可以预测:未来12到18个月内,半自主加人工兜底将成为主流;2到3年内,封闭园区和标准化赛道上的完全自主运行,将从“亮点”变为“标配”。真正的难题不在算法,而在于边缘场景的特殊情况——积水路面、光线突变、意外障碍物等,这些才是自主导航的“最后一公里”。
散热:易被低估的底层硬门槛
如果说自主导航的困境在于算法,那么赛场上冰袋所凸显的另一个问题则更为基础——散热。
国海证券的行业研报揭示了人形机器人热管理的核心矛盾:机器人运行时,约90%的能量最终转化为热量,而非用于做功。这意味着,持续输出功率达数十瓦甚至数百瓦的关节电机,以及持续进行大规模矩阵运算的AI芯片,每秒钟都在积累废热。若热量无法及时排出,关节会过热降频,灵巧手会失去精确度,电池管理系统会触发保护性断电。
具体难度有多大?以灵巧手的微型关节为例,其内部腔体间隙不足2毫米,几乎没有空间容纳风扇或散热片,是机器人散热设计的“极限挑战”。
赛场上最原始直接的应对方式是冰袋和降温气雾喷剂(如压缩空气、四氟乙烷、氯乙烷等)——通过物理吸热来降温,简单粗暴,但本质上是“机器人中暑后由人降温”,而非机器人自主管理热量。这类被动式外部散热方式,说明当前多数商用机器人的热管理系统仍不完善。

那么,真实的散热技术路径有哪些?
第一条路:风冷,经济但有局限。强迫风冷(通过风扇强制气流循环)的散热效果是自然散热的5到10倍,且结构简单、成本可控,是当前多数中低端人形机器人的选择。但风冷的缺点也很明显:噪音大、占用体积、对关节内部散热无效。
第二条路:液冷,成中高端机型主流。以冷却液为介质,通过微通道冷板与发热器件直接接触换热,带走热量后再经散热器排到外部。目前宇树科技、智元机器人等头部厂商量产的整机产品中,液冷已开始规模化应用。三花智控等热管理供应商的数据显示,液冷模组可将关节电机温升控制在15摄氏度以内,效果显著优于风冷。
第三条路:相变材料,被动散热新方向。相变材料(PCM)利用物质相态转变(通常是固 - 液转变)过程中吸收大量潜热的原理散热——温度几乎不上升,吸热量远超普通导热材料。由于无需泵、管道等主动部件,特别适合空间极度受限的灵巧手关节。目前在3C电子和航空航天领域已有成熟应用,向人形机器人迁移的瓶颈在于成本和批量生产工艺。
第四条路:“电子血液”,激进的全系统方案。斯坦福大学等机构已提出在机器人内部构建类似人体血液循环的液冷网络,同时冷却关节电机和AI芯片两个主要热源,并通过同一个散热器排出热量。这是系统级的解决方案,并非单点突破,需要机械结构、流体设计和热算法的协同,预计商用时间在5年以上。
还有一个易被忽视的方面:热管理与机器人续航高度相关。电池放电效率受温度影响极大——过热或过冷都会导致可用容量大幅减少。设计良好的热管理系统,不仅能保护关节和芯片,还能让电池在最优温区工作,间接提升有效续航。
从投资角度看,直接受益的产业链有三个方向:液冷循环系统(泵、阀、冷板)的热管理供应商、高导热界面材料(硅脂、凝胶、相变材料)的材料厂商,以及一体化关节(集成电机、减速器、散热结构)的本体厂商。
机器人真的准备好了吗?
半马赛场上有个值得关注的细节:夺冠的“闪电”全程未使用冰袋,其液冷加高功率关节方案经受住了21公里连续高负载运行的考验;而不少使用冰袋的机器人,要么中途退赛,要么需要频繁休整。

这个对比本身就说明了部分问题:机器人之间已出现代际差距。
荣耀、宇树、智元等头部企业已在硬件热管理和高功率关节上率先突破,而跟进者还在依赖原始的物理降温方式解决问题。这意味着人形机器人赛道的马太效应可能比预期来得更快。
但更值得注意的是:半马冠军“闪电”跑出50分26秒的成绩,背后的荣耀团队为这场比赛动用了整支工程师团队提供陪跑保障。
机器人在赛场上跑赢了人类,但在赛场下,仍需要人类提供全程后勤支持。
这才是人形机器人当前的真实状态:演示阶段基本结束,工程化阶段刚刚开启。从“能跑”到“能自主跑”,从“有人照顾着跑”到“无人值守跑”,还有很长的路要走。而散热问题,只是众多难题中最直观可见的一个。
50分26秒是一个里程碑,但要让机器人真正走进工厂、仓库、家庭并发挥作用,需要跨越的障碍远不止一场半马的距离。

本文来自微信公众号 “首席商业评论”(ID:CHReview),作者:卫明,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com