
在“车位到车位”的对决中,智驾第一梯队更难进入。



编者按:当高阶智能驾驶跑道开始拥堵时,头部选手建立了一个名字。「车位到车位」新秩序,它指向一种智能驾驶能力,覆盖整个场景,应对极端情况,甚至整个过程都没有接管,「全国都好开」口号形成共振。
在这个更高能量的游戏规则下,结合落地速度、实际表现和技术逻辑,「汽车之星·商品清单」在年度名单中,我们将选出一批「车位到车位」年度开拓者,他们跳进台前,重新定义「智驾第一梯队」。
继「全国都能开」后,「车位到车位」成为智驾最新的评价标准。
具体分为两个方面,「有没有」以及「强不强」,这就区分了强者和恒强者的身份。
纵观全球,特斯拉、华为、理想、小鹏、小米、极氪六大智能驾驶玩家都进入了全球。「车位到车位」竞争场地。
一场更加严格的像素级竞争开始后,新老势力追逐第一梯队的弦崩得更加紧张。
适者生存,有人离终点更近一步,意味着有人离淘汰也更近一步。
01 当智驾讨论「车位到车位」到时候,到底在说些什么
端到端落地后,竞争的关键在于客户体验。
从营销的角度来看,客户体验是一个非常笼统的词。汽车公司/供应商需要使用有力的论点,让用户看到穿透痛点的价值。
所以,所有的玩家都盯上了「车位到车位」。
根据字面意思,华为率先提出了这个概念,它指向了从随机停车位到目的地停车位的全过程智驾。
假如说此前「全国都能开」就是从表面上证实开城规模广泛,现在「车位到车位」即从点上明确实用价值强,「从 A 打开到 B 点」底层逻辑映射到现实中。
小鹏、理想、极氪、小米在华为打出样本后,心照不宣地把样本「车位到车位」提上日程。
特斯拉,大洋彼岸,最近也将「车位到车位」最新版本的功能升级到智驾。 FSD V13.2 中。
对于这个功能的叙事,我们试图从六个玩家那里解读其背后的隐含意义,主要有三点。
一是全场景覆盖。
「车位到车位」从停车场到公共道路、公共道路到公园、公园道路到地下车库等多种场景,其中,「过闸机」能力成为表达关键字。

理想强调,在端到端大模型的应用下,系统可以独立通行。 ETC,而且不限范围,不需要学习,全国超越。 1 一万个收费站都可以识别通行。
极氪表示该功能具有行业首个行业。「四抬杠」能力,能准确捕捉毫秒级的杠杆状态,通过地库闸机、高速公路自动识别和自动识别。 ETC 闸机,公园闸机等。
二是处理复杂的路况。
在此之前,汽车公司在讨论智驾能力时,往往把应对多个极端情景作为重点论据。但是极端情景的多样性是无穷无尽的。
但在「车位到车位」在语境中,强调智驾应对复杂路况的连贯性和完整性。
小鹏强调汽车在那里「车位到车位」在整个过程中,能够应对复杂的路口、集流变道、识别和避让特种车辆,实现 U 其他操作,如型调头,做到全程无接管。
三是连接停车功能。
在自动停车能力方面,汽车公司已卷入厘米、分秒等级。
在此,小鹏表示,系统可以停留在比车身宽的地方。 30cm 极窄停车位,号称侧向、断位、刁钻停车位。「一把到位」;
极氪跟上,声称其停车功能支持车宽 上下 20cm 窄停车位停车,平均停车时间 36 秒,可以在压线的前提下实现智能偏移。
如今,在「车位到车位」在应用场景中,这种优秀的停车能力与汽车驾驶之间没有断点。当客户坐在车里时,他们可以启动智能驾驶,系统可以在自动驾驶和停车的无缝配合下到达下一个停车位。

由此,越过「车位到车位」这个大坎的玩家,正在新的度量衡中打开竟速。
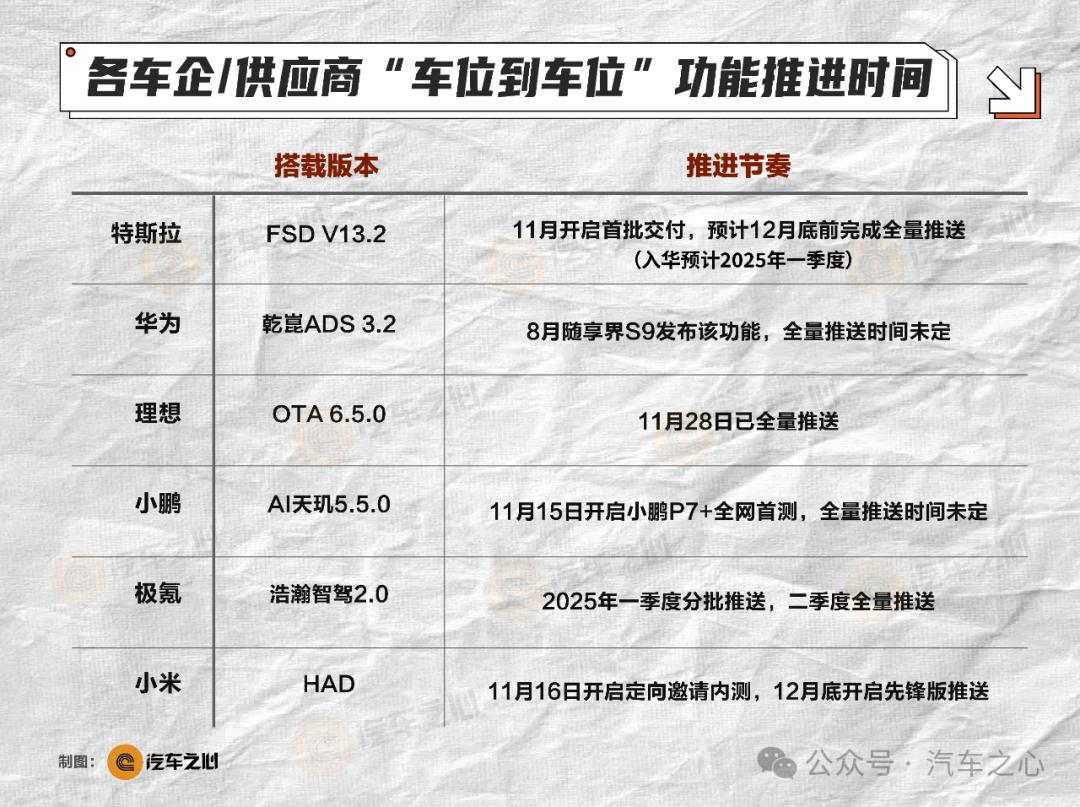
现在,理想已经存在 11 月底全部推送「车位到车位」功能方面,华为、小米、小鹏、特斯拉都开始了一定程度的内部测试,预计明年全面推送,而极氪预计明年第一季度分批推送,第二季度全面推送。
02「车位到车位」在水面下,暗潮相互涌动。
每个家庭都亮出来的时候「车位到车位」招式时,如何判断功能好坏的问题接踵而至。
理想汽车技术专家文治宇曾一针见血地指出,车位到车位做得好不好,主要取决于两个关键因素。
一是感受衔接性,也就是说,在开始这个功能之前,是否需要多次学习,学习后是否可以立即开始使用;
二是商品完整性,也就是说,对于一些复杂的起步场景,比如多层车库能不能控制,做到全程无断点。
围绕这两点,我们来看看这些玩家。「车位到车位」通过将功能放入审视场域,可以清楚地看到共性和差异。
共性在于,无论是内测还是全推,目前国内玩家在地下室、关闭停车场景时都需要先由用户运行,因为没有导航信息。「图」。
具体的绘图方法还不一致。有玩家要求车企跑完地下室的所有路线,相当于在地下室建了一个全面清晰的地图后才能使用。「车位到车位」;
另外一个想法是,客户只需按照系统要求,完成起点、目的地车位进口、出口路线学习,即可启动此功能。
当然,系统还会结合客户的常规驾驶路线数据,通过默默学习,一键生成通勤路线。「车位到车位」。
所以,唯一的区别就是,「车位到车位」该功能是否适用于初次行驶场景,即用户在生疏道路上不建图,也可以全程使用智驾。
目前似乎只有特斯拉做到了。。
外国客户实测 FSD V13.2 在这个版本的视频中,客户在停车场的顶楼开车进入多层楼,甚至标记不清楚后,故意绕了很多圈子。 FSD,然而,打开智能驾驶后,系统很快找到了正确的路线,并从出口驶出停车场,而不是提前学习路线,没有无目的的转身和跟车。
假设国内玩家「车位到车位」功能需要在打开之前学习路线,这意味着它目前适用于固定和高频的出行路线。特斯拉取消这种先验条件后,客户可以从停车位打开智能驾驶,前往任何地方。「无图」区域。
另外一个区别是,对于玩家来说,「车位到车位」解决问题的实际思路还没有一致:
一派以理想为代表,遵循理想。「VPA NOA VPA」技术路径。
也就是说,在停车场道路上,驱动系统驾驶的是记忆停车/代客停车模式,进入公路后,立即转变为智能驾驶领航模式。从 SR 图片可直观地看到,当系统进入停车场景时,智驾界面将从停车界面顺利切入。
这个路径,也成了目前大多数玩家的选择。
另外一个派别代表特斯拉、小鹏,以一套方式打通整个场景。。

也就是说,无论是在公园的封闭路段、地下车库区域,还是在公路上,SR 保持智能驾驶的界面 NOA 图片,软件系统不会随场景变化而转换。
小鹏自动驾驶商品高级总监袁婷婷表示,这种方式的优势在于,当你开车去停车场和公共道路的交汇处时,系统不会因为转换软件而卡住,相当于从汽车开始转换到汽车。 NGP 保证系统中的感觉一致性。
行泊一体化的思想,也使 XNGP 在封闭场景和停车场区域,大型模型可以更好地应对绕柱、避障、极窄通道接车、持续急弯等场景。而且,与两套模型相比,一套模型的更新和维护似乎是成本和效率的优化。
总而言之,虽然特斯拉目前是 FSD V13.2 内测版看起来领先一步,但是距离它进入中国还有一段时间。
同时,国内玩家的技术飞轮也在疯狂旋转,不断优化。「车位到车位」功能,更新到最后全量推送的版本。
输赢仍有待确定,直到真正同台竞技的那一刻。
03 从端到端进化到 2.0 时代
「车位到车位」,可视为每个玩家的对象「端到端」实际解读方法论。
「端到端」上了车,本来指向了 AI 该系统具有类人驾驶的能力。一个神经网络涵盖了从感知到控制的所有模块,然后在面对极端场景时,它不再被生硬的规则所控制,而是像人类司机一样观察、思考、决策和执行。
这反映到「车位到车位」在实际场景中,系统可以应对各种极端情况,驾驶水平越来越好,从而形成了技术-应用的完整闭环。
数据闭环迭代过程中,「端到端」技术也演变成了 2.0 阶段。
此时,投身于端到端浪潮的头部玩家,从路径收敛到路径分离的十字路口。
在划分感知规控模块的同时,「端到端的两段式」向「端到端一段式」奔涌。
前一种方式将感知模块视为一段,预测决策模块视为另一段;后一种方式是将感知和控制端到端模块全部打开。
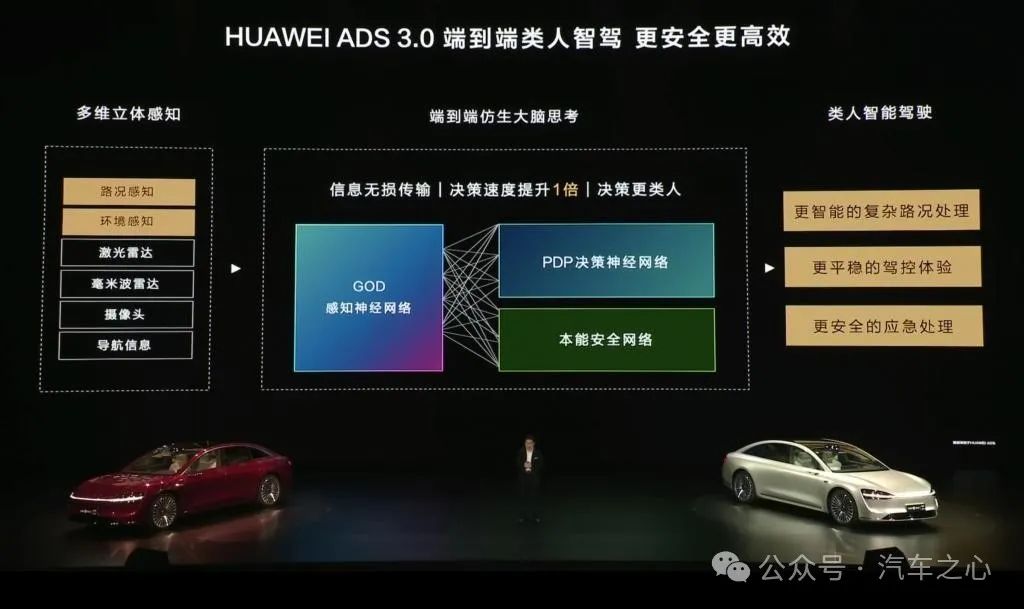
「端到端的两段式」一个典型的代表就是华为干 ADS3.0,由 GOD PDP 网络组成,GOD 互联网负责感知、识别障碍物,PDP 网络根据感知信息迅速做出决定。
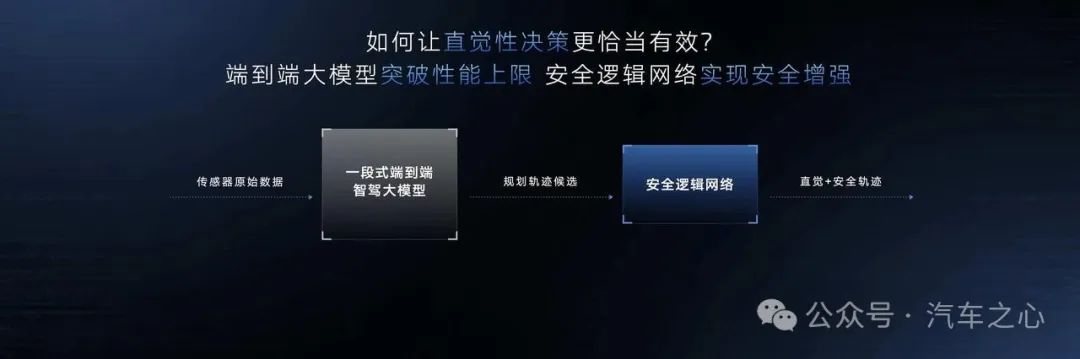
而「端到端一段式」主要玩家有 Momenta、商汤科技等,将感知端到端和控制端到端都集成到一个大模型中,使系统能更直观、更有效地处理数据并采取行动。
一段式端到端是两段式端到端的进化形式。由于其开放感知、规控端到端阶段,模型感知信息更加准确,规控反应更加流畅灵活,智能驾驶水平更强。
Momenta 这条进化路径已经实践过了, 2023 今年上半年,量产两段式端到端后,又实现了一段式端到端落地。
根据媒体报道,华为汽车 BU 还在攻击一段式的端到端方案,这可能会变成 ADS 4.0 重要的版本能力。
另外一面是从技术路线上思考,「端到端 VLM」朝「VLA」路径开始迭代。
理想以「快慢系统」在理论的基础上,首先设计出一套「端到端 VLM(大型视觉语言模型)」系统。
两种模型分工合作,端到端模型基于快速思考,负责处理常规驾驶行为,VLM 通过慢思考,模型可以应对极端的困难情况。
而 VLA 模型是最近走上技术神坛的关键字,由元戎启动率先提出。
VLA 也就是视觉-语言-动作模型,很明显,从名字中可以找到,「端到端 VLM」整个系统融合体。

这样的一体化方式,使得系统在接收数据之后,不再由「快慢」系统实现了几次交互和调整,而是一次生成最终的驾驶指令,提高了信息处理和决策的效率,能够应对几十秒路况的长期序列推理等一些更具挑战性的长尾场景。
在最近理想发布的高级工程师招聘细则中,明确提到了一条「下一代自动驾驶端到端负责研发和实施理想汽车。 VLA 大模型算法」,再次验证了 VLA 模型将成为未来的解决方案。
事实上,不管是什么「端到端一段式」还是「VLA」模型的新进化,背后是对的 AI 进一步消耗资源。
模具参数越大,对硬件计算率、数据闭环迭代能力的要求就越高。
据悉,布署 VLA 模型,直接来到芯片算率级别。 NVIDA DRIVE Thor,算率高达 1000 TOPS。
在资源战开始之后,智驾第一梯队和其他玩家之间的分界点变大了。
在端到端 2.0 在时代,性能体验和成本都无限延伸到不同的方向:
性能向高处迈进,「车位到车位」成为衡量智驾水平的核心层次;
成本走向低位,高阶智能驾驶正在迅速落地 20 一万元以内的新车。
在前后的夹击下,其他智驾玩家,「性价比」负担更重了。
也就是说,智驾「第一梯队」走得越来越快,掌握了更多的资源,一场马太效应正在行业中默默蓄势。
市场非常现实,如果不想被规则淘汰,那就只能改写规则。
本文来自微信微信官方账号 “汽车之心”(ID:Auto-Bit),作者:刘佳艺,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com