
《洞见·机器人外科》| 多机协同护创高效:浙江省人民医院护理体系的创新实践







喻晓芬(标清)
近年来,浙江省人民医院以加速康复外科(ERAS)理念为核心,针对机器人手术护理实践中的痛点难点,构建起系统化、标准化、创新化的护理体系,显著提升临床运营效率,形成可复制推广的行业范本,为机器人手术护理领域发展提供关键借鉴。
本期《洞见·机器人外科》以“多机协同 护创高效”为主题,围绕外科手术机器人的手术室运营管理,深度对话浙江省人民医院手术室护士长喻晓芬,探讨临床问题收集机制、多元化培训、科研成果转化、跨团队协同等方面内容。
直击临床痛点:构建系统化问题收集与解决机制
临床痛点是科研创新起点与护理体系优化核心导向。浙江省人民医院手术室团队在ERAS理念落地与机器人手术护理实践中,直面流程断点、护士技能差异致配合效率波动等问题,建立闭环式临床问题收集与分析机制。
喻晓芬指出,护士长日常督查时应定期承担巡回护士角色,深入手术一线捕捉护理配合缺陷。发现流程中断当场纠正并即刻启动原因分析。以机器人辅助腹腔镜前列腺癌根治术尿道重建环节为例,曾出现洗手护士未及时锁定器械离合按钮致主刀医生无法激发器械的问题。团队多维度拆解原因后,细化《器械臂更换操作流程表》,编制“一听(适配完成提示音)—二推(显示器监视下缓慢推送器械臂到手术区)—三锁(锁定器械离合按钮)—四接(能量器械检查能量导连接)”口诀,具象化操作细节,纠正认知偏差,堵住流程漏洞。
 这套“现场发现—多维度分析—精准施策—口诀化固化”机制,让临床问题得到及时响应与系统性解决,为后续护理体系优化奠定坚实基础。
这套“现场发现—多维度分析—精准施策—口诀化固化”机制,让临床问题得到及时响应与系统性解决,为后续护理体系优化奠定坚实基础。
分层突破:多元化培训模式破解护士技能差异难题
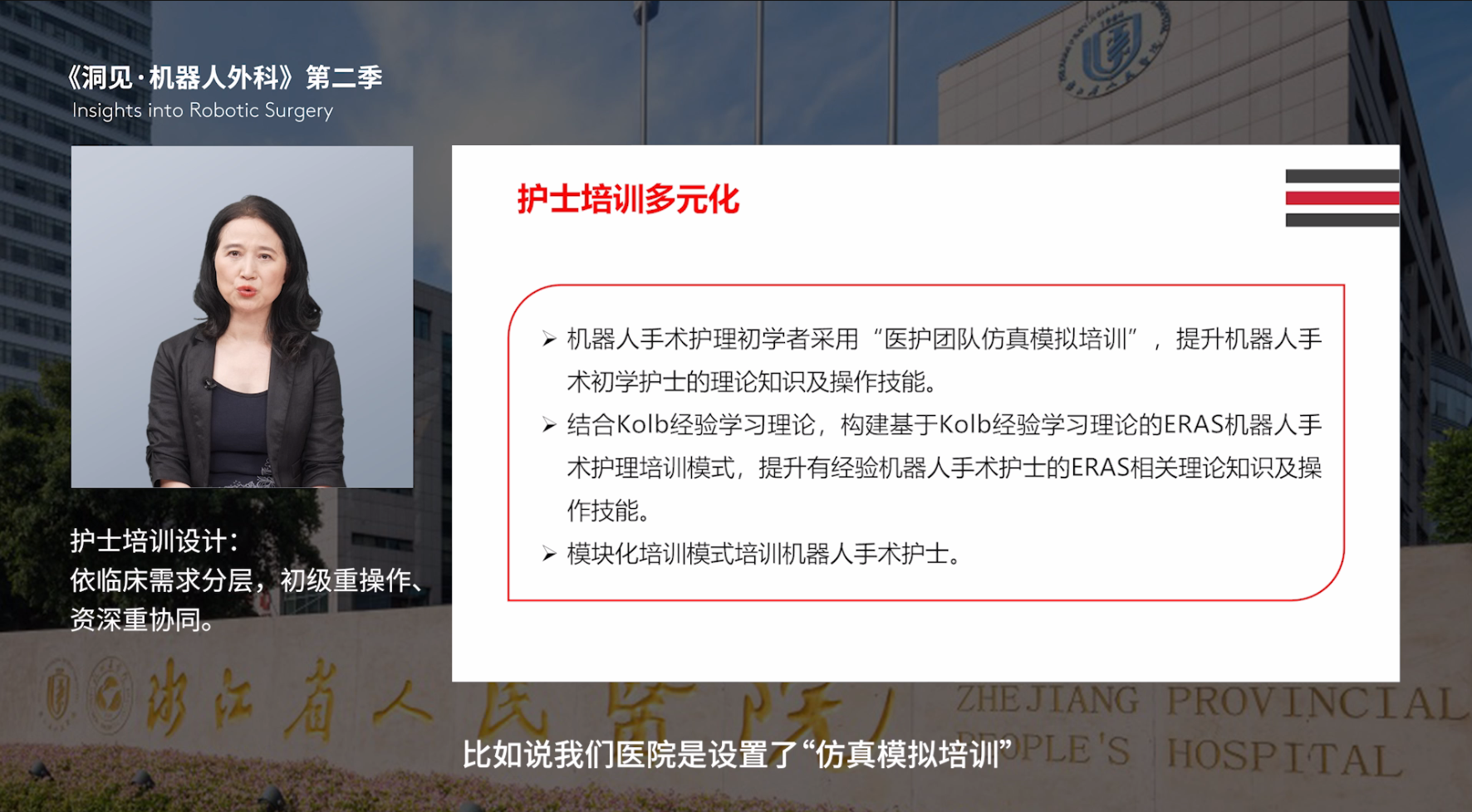
护士技能差异是影响机器人手术配合效率的核心痛点。浙江省人民医院手术室团队基于临床需求,设计差异化、阶梯式多元化培训模式,精准匹配初阶与资深护士能力提升需求。
针对机器人手术护理初学者,推行仿真模拟培训,聚焦设备基础操作核心要点,涵盖机械臂无菌套安装模拟、器械臂更换路径优化、床旁机械臂系统快速定位及能量设备功率设置等实操内容,帮助初阶护士快速掌握基础技能,补齐操作短板。对有经验的资深护士,培训重心转向“人-机-团队”协同的情景意识培养,强化动态手术环境下的精准决策与场景态势感知能力,如术中紧急情况角色定位、与术者高效配合决策等,推动资深护士从“操作执行者”向“手术协同决策者”转变。
 专科护理标准化方面,团队贯彻规范流程:用培训用前列腺3D打印模型向患者及家属解释手术过程;采用预保温、手术全程主动与被动保温等综合性保温措施预防术中低体温;术中保持小腿下垂式反弓分腿卧位,术后患者清醒时更换间歇充气加压装置为弹力袜预防深静脉血栓;全身麻醉生效后留置导尿管降低患者导管刺激所致应激性反应;协助麻醉医生实现术中目标导向液体治疗;避免因手术护理因素延长手术时间等。
专科护理标准化方面,团队贯彻规范流程:用培训用前列腺3D打印模型向患者及家属解释手术过程;采用预保温、手术全程主动与被动保温等综合性保温措施预防术中低体温;术中保持小腿下垂式反弓分腿卧位,术后患者清醒时更换间歇充气加压装置为弹力袜预防深静脉血栓;全身麻醉生效后留置导尿管降低患者导管刺激所致应激性反应;协助麻醉医生实现术中目标导向液体治疗;避免因手术护理因素延长手术时间等。
同时,团队结合Kolb经验学习理论构建ERAS机器人手术护理培训模式,辅以模块化培训体系,形成覆盖不同层级护士的全周期培养方案,有效抹平技能差异,提升整体护理配合稳定性。
科研转化:从临床实践到学术成果的闭环路径
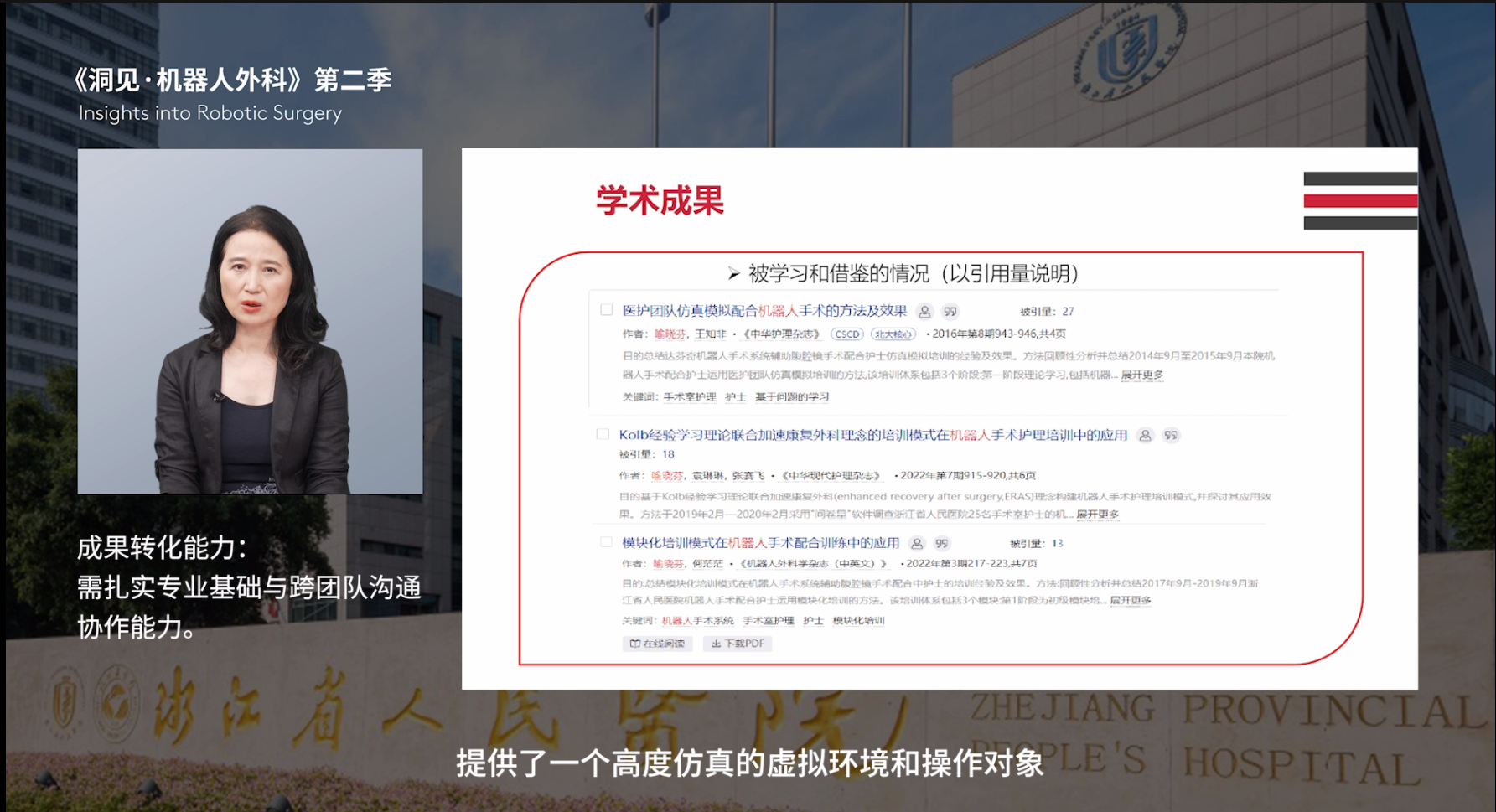
从创新培训方法临床落地到产出《中华护理杂志》等核心期刊研究成果,浙江省人民医院团队摸索出“临床问题→科学问题→学术表达”的科研转化路径,实现临床改进与学术研究良性互动。
以仿真培训效果研究为例,团队发现仿真培训后护士器械传递速度显著提升,但术中团队协作能力未同步改善。基于此凝练出“仿真训练对机器人手术护士操作速度与决策质量的差异化影响”科学问题,运用“PICOS”框架结构化分析,锁定“场景感知不足致使决策延迟或错误”核心原因,引入理论框架支撑培训体系优化,让机器人手术护士培训实现结构化、可操作化、可复制化。
 数据收集环节,团队坚持客观化、精细化原则,拆分护理操作各步骤并精准记录完成时间,理论知识考核以客观性命题为主,减少主观因素干扰,确保培训效果评估真实性。这种“临床现象提炼科学问题-理论框架支撑解决方案-客观数据验证成效”模式,让每一项临床改进都形成扎实学术论证,相关成果成为行业重要参考。
数据收集环节,团队坚持客观化、精细化原则,拆分护理操作各步骤并精准记录完成时间,理论知识考核以客观性命题为主,减少主观因素干扰,确保培训效果评估真实性。这种“临床现象提炼科学问题-理论框架支撑解决方案-客观数据验证成效”模式,让每一项临床改进都形成扎实学术论证,相关成果成为行业重要参考。
同时,临床痛点促进变革创新,团队以“专利锁定创新点,数据分层验证”模式,平衡实践改进时效性与学术论证严谨性。面对手术台布局混乱影响操作效率问题,团队自制优化腔镜手术台布控的集成装置并申请专利,快速规范术野周围器械、管道、导线管理;同步收集临床数据,术后由团队及时填写量表数值,为学术结论提供支撑,实现“临床创新—专利保护—数据验证—成果发表”全链条转化。
成果落地:以核心能力推动技术辐射与行业借鉴
浙江省人民医院团队研究成果多次被引用、技术被多家医院借鉴,为众多医院开展机器人手术护士培训提供范本,充分体现临床转化价值。关键在于护理团队具备跨科室沟通、项目管理、持续跟踪评估等核心能力,尤其重视跨团队协作——机器人手术中术者在远离手术台的控制台操作,对器械臂空间状态缺乏直观认知,器械护士需与术者实时沟通器械臂运行情况,保障手术系统稳定运转。
 截至目前,医院已完成8000余例机器人手术,护理体系优化带来显著效率提升:无菌屏障建立时间(从套第一个机械臂至套管支架与穿刺器对接完成)从平均48分钟缩短至26分钟,接台时间(从前一台手术皮肤缝合完毕至后一台手术切皮的时间)从平均46分钟缩短至34分钟,术中故障识别及处理时间从平均8.8分钟缩短至1.2分钟。团队还参与主导制定中国研究型医院学会发布的团体标准《达芬奇机器人手术体位安置》,推动机器人手术护理从“个体化经验”走向“行业标准化”。此外,团队成果斩获浙江省科技进步奖一等奖、三等奖,每年培训机器人手术专科护士十余人,接待二十余名同行参观学习,形成技术辐射与行业带动的良好效应。
截至目前,医院已完成8000余例机器人手术,护理体系优化带来显著效率提升:无菌屏障建立时间(从套第一个机械臂至套管支架与穿刺器对接完成)从平均48分钟缩短至26分钟,接台时间(从前一台手术皮肤缝合完毕至后一台手术切皮的时间)从平均46分钟缩短至34分钟,术中故障识别及处理时间从平均8.8分钟缩短至1.2分钟。团队还参与主导制定中国研究型医院学会发布的团体标准《达芬奇机器人手术体位安置》,推动机器人手术护理从“个体化经验”走向“行业标准化”。此外,团队成果斩获浙江省科技进步奖一等奖、三等奖,每年培训机器人手术专科护士十余人,接待二十余名同行参观学习,形成技术辐射与行业带动的良好效应。
未来展望:瞄准行业标准与青年人才培养持续突破
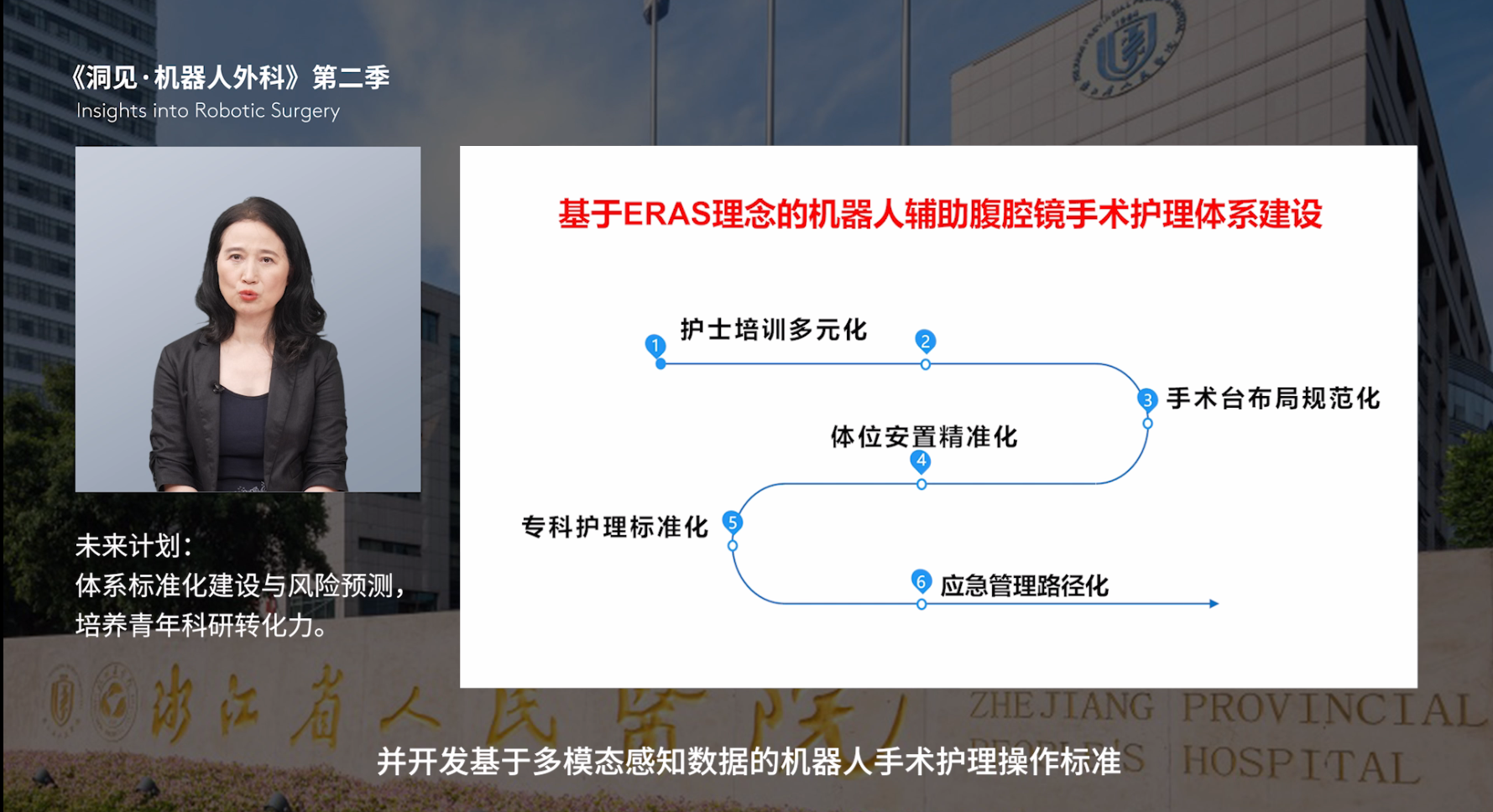
在外科机器人手术护理科研转化未来布局中,浙江省人民医院手术室团队锚定两大方向:一是推动行业标准体系建设,开发基于多模态感知数据的机器人手术护理操作标准,借助护士个人操作数字画像生成个性化训练方案,构建护理风险预测模型;二是强化青年护理科研人员培养,通过“手术机器人系统原理+专科护理”融合培训提升技术能力,依托真实世界研究设计、人工智能应用培养科研能力,围绕专利撰写、标准申报增强转化执行力,为行业储备复合型人才。
 从临床痛点出发,以创新培训夯实基础,以科研转化凝练成果,以标准制定引领行业,浙江省人民医院手术室护士长喻晓芬及其团队构建的机器人手术护理体系,实现医院内部手术效率与护理质量双提升,更以可复制推广的经验,为全国机器人手术护理管理提供“浙江范本”。
从临床痛点出发,以创新培训夯实基础,以科研转化凝练成果,以标准制定引领行业,浙江省人民医院手术室护士长喻晓芬及其团队构建的机器人手术护理体系,实现医院内部手术效率与护理质量双提升,更以可复制推广的经验,为全国机器人手术护理管理提供“浙江范本”。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com