
美团队研发新型可变形机器人,可应对复杂地形






IT 之家 10 月 18 日消息,据外媒 Interesting Engineering 当日报道,美国北卡罗来纳州立大学研究团队成功研发出一种新型薄片机器人。这些机器人无需马达,却能完成多种动作,还可以折叠成数百种稳定形态。
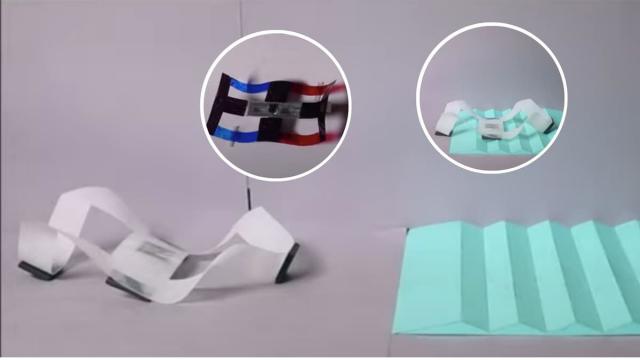
名为“metabots”的这些机器人,就如同会动的塑料薄片,能够在表面滑动或者抓取物体。
北卡罗来纳州立大学机械与航空航天工程教授、论文通讯作者殷杰(音译)称:“我们从带孔的简单聚合物薄片入手,在薄片表面涂覆特殊薄膜,就能加入对电或磁场敏感的材料。这些薄膜充当执行器,使我们能够远程控制薄片形状。”
IT 之家从报道中了解到,这些平面机器人具备多种运动模式,能够跳跃或爬行,并且可以调节速度。
论文第一作者、北卡罗来纳州立大学博士生周才志(音译)指出,多个薄片连接后,最初平铺的结构能够自行弯曲和折叠,形成多种稳定形态。“例如四片薄片连接在一起,metabot 既可以像纸张一样平坦,又能折叠成 256 种不同的稳定状态。”
研究团队还表示,这些机器人可以根据地形变化调整自身形状和步态,执行抓取、搬运等多种任务。“在薄膜中加入压电材料后,通过调节电压和频率,能让 metabots 产生可控振动,从而精确控制其运动。比如,metabot 可以在原地向左或向右旋转。”
该研究成果发表在《Science Advances》上,其利用可展开表面的多稳定薄壳超构结构,实现了高可重构性,用于自适应操作和运动。这些结构通过切割并粘合带孔的薄聚合物片构成,能够可编程存储弹性能量。
单个单元可实现 20 种稳定形态,而四单元组合通过简单折叠能产生 256 种重新配置状态。
研究人员表示:“当这些超构结构与多响应软执行器结合后,便形成了高度自适应的 metabots,包括通用非侵入双稳软抓手、磁力多步态跳跃器以及由磁力和电活性驱动的双响应爬行器。”这些系统适应性强、机动性高,能够通过按需变形在复杂地形和狭小空间中自由行动,为节能且可重构的软体机器人平台奠定了基础。
殷杰表示:“这只是初期的概念验证,但表明这种机器人方法既低成本又高度灵活。我们期望将超材料与机器人技术相结合,实验结果显示前景十分可观。”
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com