
卓玉亮相全新一代个性化生成智能驾驶功能 GenDrive,今年大规模生产




IT 世家 3 月 19 日消息,卓控 AI 昨天首席陈晓智出席 NVIDIA GTC 2025 发表主题演讲《基于端到端世界模型的生成智能驾驶体验》,分享了卓控在端到端智能驾驶技术方面的近期进展,并公布了卓控基于端到端世界模型的全新一代智能驾驶功能 —— 可以支持自然语言交互的个性化生成智能驾驶方案 GenDrive。
卓驭认为,好用的高级智驾,除了足够的拟人之外,同时满足用户个性化的驾驶需求。因此,卓控首次提出了基于端到端世界模型的“生成智能驾驶”—— GenDrive 与传统的智能驾驶体验相比,“生成智能驾驶”的概念不仅能给用户带来拟人化的感受,还能满足用户个性化的驾驶喜好。
传统的端到端结构更多的是基于预测范式的端到端,即观察传感器的输入,预测下一步的动作,因此是一个一次性的动作预测过程。
而 GenDrive 选择生成技术做端到端,通过世界模型生成未来可能出现的技术。 N 一个平行宇宙,结合用户偏好和各种环境信息,选择最佳轨迹导出。
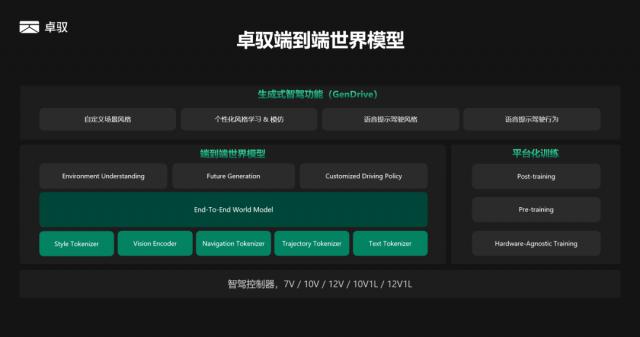
卓控的端到端世界模型整体架构,底层是硬件平台,包括智能驾驶控制器,可以应用于英伟达的计算平台,比如 DRIVE Orin / Thor SoC,并可以适应不同类型的传感器。
在模型输入部分,卓驭通过 Vision Encoder 和若干 Tokenizers 编码传感器数据、导航信息和历史轨迹的输入。此外,在卓控端到端的世界模型架构中,驾驶风格将通过文本编码器输入模型,并通过某种表达方式编码用户的语音命令。
对模型导出,则涵盖了对周围环境语义和几何的认识,以及对未来各种可能性的产生。
最后输出驾驶轨迹,是与用户风格偏好、语音命令对齐后的结果。
练习端到端世界模型,卓驭选择典型的大模型预训练。 以后的训练方式进行,并能实现“硬件无关”的平台训练。,也就是说,根据不同的传感器构型,不同的芯片类型,只需训练一个模型,就可以部署到不同的硬件构型。
卓驭的生成式智驾基于上述端到端世界模型架构,具有以下功能:
定制情景级驾驶风格:比如跟车过程的风格(起步速度、距离等)、速度控制风格,路口转弯风格,变道风格等。
在线学习和模仿用户的驾驶风格:基于用户一段时间的驾驶记录,模型自动学习用户的驾驶风格偏好。整个学习过程只需要使用汽车计算率,不需要与云的任何互动。同时 GenDrive 还可以支持多种客户风格的学习,可以结合驾驶舱内的人脸识别,自动绑定不同用户 ID,选择合适的客户风格自动激活。
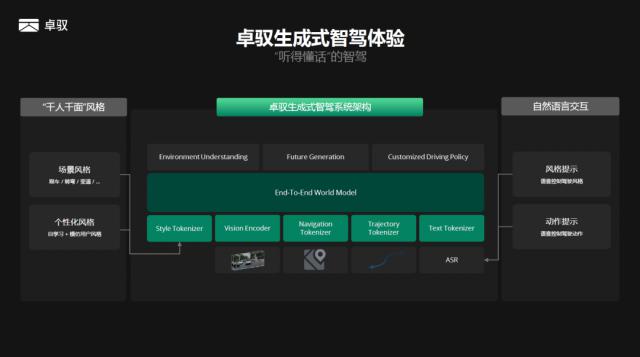
驾驶风格和动作可以通过自然语言交互来调整:驾驶风格是指对长时间驾驶行为的描述,例如用户通过语音对话“我容易晕车,能不能开慢点”、模型可以自动识别用户偏好的温和或激进的驾驶风格,如“不能让其他车辆堵塞我”。驾驶动作是指用户通过语音对话“不要开最左边的车道”等具体而瞬间的动作。、“进入辅路”、“靠边停在那辆白车后面”等等,模型可以理解顾客的意图,并且可以实时改变模型的行为轨迹。

IT 世家从卓驭官方获悉,这是业内首次提出的生成式智驾感受能力,今年将有相关车型进行量产和落地。。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com