
第一个中国太空采矿机器人来了!如何采矿“星际矿工”?
2025-03-19




过去科幻小说和电影中存在的太空采矿正在逐渐走向现实。最近,中国第一台太空采矿机器人诞生在中国矿业大学。
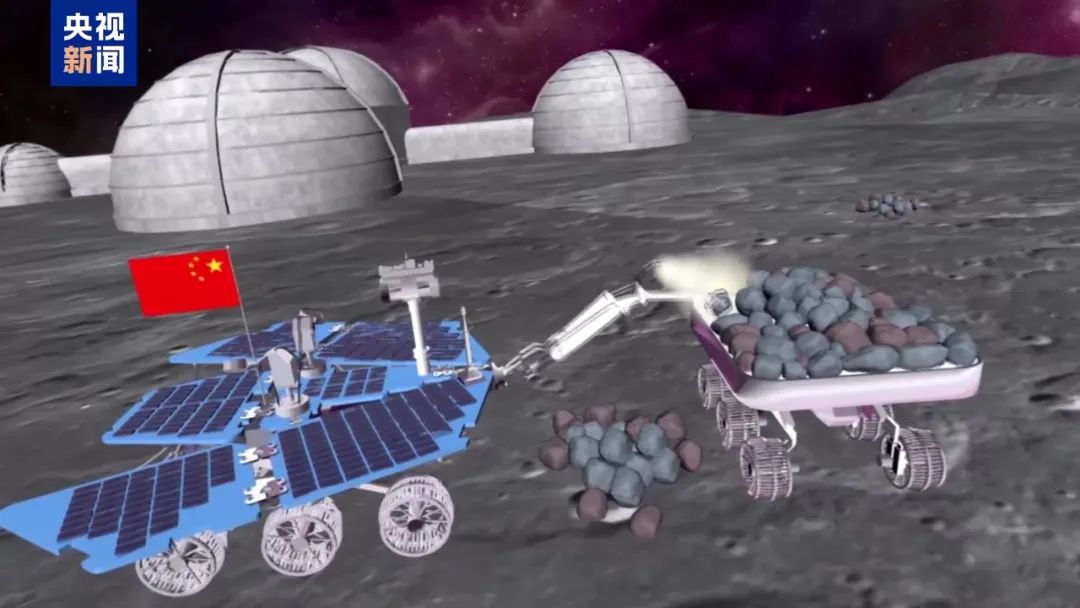
中国矿业大学教授刘新华团队开发的多功能太空采矿机器人,基本形式为六条腿,有三个轮子和三只爪子。这种设计的主要目的是适应太空中的微重力环境。
太空采矿机器人需要在地外星体上完成地质勘探和矿物采集任务,这是一项必要的技能。在地球重力环境下,机器人本身的重量足以支撑钻头进入,而月球重力只有地球的六分之一,大部分行星都是低微重力。如何让钻头顺利进入星体表面已经成为一个大问题。
为解决失重带来的漂移问题,研究小组想到了模拟昆虫爪刺结构,所以为太空采矿机器人设计了特殊的爪刺脚。
据刘新华教授介绍,这种结构属于阵列爪刺。在微重力环境下,它具有很强的附着力和很强的抓地力。在微重力环境下,机器人不仅可以固定采样,还可以根据地形移动。
它不仅可以适应空间的微重力环境,还可以在行星坑洼洼的地面上行走,机器人脚的末端配备车轮和锚固结构。目前,太空采矿机器人原型机已向相关部门申请专利,并通过初审。
刘新华教授表示,研究小组已经实现了太空微重力的等效试验,该机器人已经完成了行走、锚定甚至取样,在模拟月壤的环境中。
策划制作
题目:“中国第一个太空采矿机器人来了!星际矿工如何采矿?”
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com