
傅利叶开源全尺寸人形机器人数据 Fourier ActionNet




IT 世家 3 月 17 今天,机器人公司傅利叶宣布开源全尺寸人形机器人数据 Fourier ActionNet,并且发布了世界上第一条全流程工具链。
首批上线超 3 一万个真机训练数据,包括各种自由灵巧的手部训练数据和专门模仿手部任务的学习数据,为全球开发者和科研机构提供一站式解决方案,从数据收集、训练和部署开始。

.
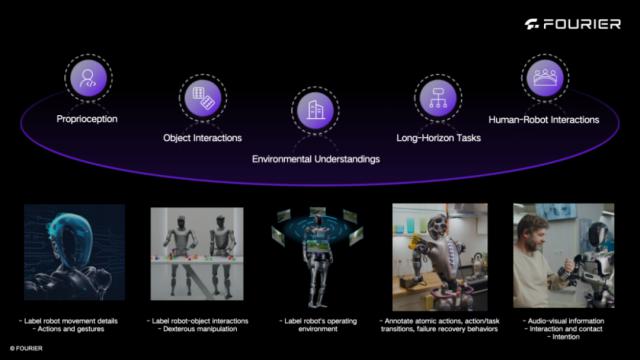
据傅利叶官方消息,Fourier ActionNet 傅利叶包括数据 GRx 对所有型号的各种任务进行训练,完全记录机器人在现实环境中的任务执行数据,它包括精确拿取和倾倒常用工具、家居用品、食品等物品的操作。,并在不同的环境条件下实现泛化执行。
1. 多模态 高品质 万级规模:万级真机训练数据,包括专门针对手部任务模仿学习数据,适应多自由灵巧的手部任务;

2. VLM 标注 人工核实:所有数据都选择视觉语言模型(VLM)通过人工二次验证,进行自动标注,确保数据的准确性和准确性。
除了数据集的开源,傅利叶还同步开放了世界上第一个全过程工具链,包括收集算法、训练算法和数据布局算法。开源训练框架(如 DP、ACT、iDP3)和部署工具,进一步降低了人形机器人技术研发的门槛。
1. 自带数据质量评估:基于扩散策略(DP)、Transformer 动作分层策略(ACT)及改善 3D 传播策略(iDP3)系统地验证数据, GRx 开柜门、抓柠檬、倒豆子等高难度任务均可在整个系列型号中顺利执行;
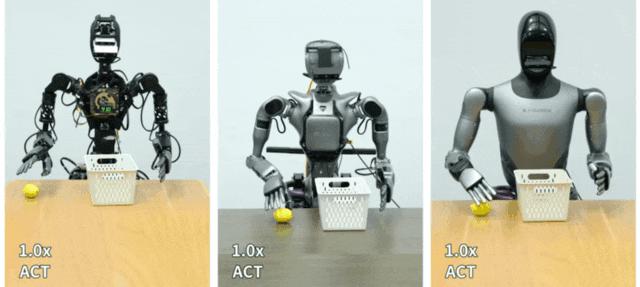
▲ 任务:多种自由灵巧手抓柠檬
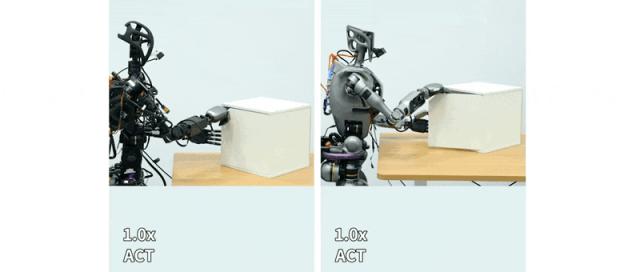
▲ 任务:6 自由灵巧的手开柜门
▲ 任务:6 自由灵巧的手倒豆子
2. 配套开发工具支持:基于同步开源 LeRobot 生态的 DP、ACT、iDP3 提供从数据管理到算法布署的全过程支持,如主流训练框架和布署框架。
IT 世家附 Fourier ActionNet 开源链接:
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com