
看透文章:人形机器人电机驱动产业链(附件 60 支付芯片方案)







电子爱好者网报道(文章 / 根据国家市场监管总局的数据,吴子鹏2024 2年我国新注册服务机器人相关企业 124,839 家庭,连续两年超过 10 万家。截至 2024 年底,全国共有 45.17 有关企业数千家。自 2024 从年底开始,国内人形机器人产业热潮开始,越来越多的机器人企业开始专注于人形机器人领域。数据显示,截至 2024 年 11 月底,全国人形机器人相关企业数量达到 6.7 万家,其中整机公司超超公司 80 家。更具代表性的公司有优必选,宇树科技(Unitree)、这些代表公司的情况如下表所示,如智元机器人、傅利叶智能和众擎机器人等。

从时间线来看,国内人形机器人起步相对较晚,一些标志性成果比波士顿动力、特斯拉等美国公司实现得更晚。但从最近的发展速度来看,国产人形机器人有追赶的趋势,这离不开产业链生态的支撑。具体来说,人形机器人产品链主要涵盖以下几个部分:上游基本组件和软件、中游整机制造和下游应用。

现在,人形机器人已经有许多完善的应用案例。例如,优必选 Walker 系列人形机器人已经在许多工厂工作。 “实习”,包括代工和汽车制造商。另外,优必选 Walker X 机器人可以陪伴老人,帮助老人上厕所,帮助他们吃饭,还可以打扫卫生,做饭等等; "夸父" 机器人可以根据衣服的类型和材料选择洗涤程序,自动放入洗衣液软剂进行洗涤,可以智能感应植物的实际需求,可以自动识别衣服的类型和大小,完成烘干任务。
没有上游硬件和软件的不断进步,整机和应用成果不断涌现。人形机器人上游的硬件可以进一步细化为精密减速器、伺服电机、丝杠、传感器、电池和电子元件,如图所示。
可以看出,丝杠(19%)、伺服电动机(16%)、减速器(13%)、在人形机器人中,传感器(11%)是一个价值比较高的阶段,总比例接近 在此之前,我们对人形机器人进行了梳理。 IMU 芯片供应,这次我们重点关注电机驱动阶段。

人形机器人中的电机驱动系统
伺服电机是运动控制的核心部件,可以将电信号转换成精确的机械运动,增加人形机器人关节的动力,实现各种灵活运动,具有精度高、速度快、扭矩高的特点。从电机类型来看,人形机器人使用的电机包括传统伺服电机(如DC伺服电机和交流伺服电机)和特殊伺服电机(如无框扭矩电机和空心杯电机)。
其中,传统DC伺服电机包括永磁DC伺服电机、换流伺服电机、永磁无刷DC伺服电机等。,适用于机器人关节驱动,具有精确控制和高响应速度。交流伺服电机分为永磁(高转距、高响应)和感应(高负荷能力),支持高速高精度控制,适用于人形机器人四肢和身体驱动。满足机器人复杂运动的需要;无框扭矩电机结构简单,功率密度高,适用于人形机器人的关节部位,可直接集成到关节模块中,减少空间占用,提高机器人灵活性;空心杯电机具有体积小、重量轻、响应速度快、效率高的优点,常用于对空间和重量要求较高的小型人形机器人或机器人关节。
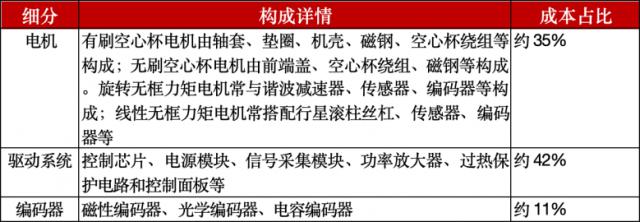
如图所示,人形机器人电机驱动系统的基本组成大致分为三个部分,包括电机本身、驱动系统和编码器。其中,驱动系统主要包括控制芯片、供电模块、信号采集模块、功率放大器、过热保护电路和操作面板。
人形机器人的电机控制
控制芯片作为控制系统的核心,负责数据采集、信号处理和指令发布,用于协调多关节协同运动。目前专门用于人形机器人电机控制的芯片并不多,大部分还是选择通用的。 MCU 主板芯片作为驱动芯片,其区别在于集成度。根据统计,单个机器人需要 30 - 40 颗高档 32 位 MCU。在这里,我们不再总结通用性。 MCU,但要注意实时控制 MCU 以及人形机器人电机驱动专用芯片。
实时控制国际制造商 MCU 主要有以下几种,分别是 TI C2000、ST STM32G4、瑞萨 RA8 系列与英飞凌 PSOC 该系列,其具体情况如下:

可以看见,TI 公司的 C2000 系列和 ST 公司的 ST STM32G4 该系列直接面向伺服驱动和电机控制。
国内企业在这方面也取得了一些具体的进展。例如,极海的 G32R501 系列 MCU,基于 Arm ® Cortex ® - M52 集成双核结构 Helium 具有高即时算率和灵活控制外设的技术,支持复杂算法的高速计算,适用于人形机器人关节控制器和灵巧手控制。
首先是半导体 HPM6E00 系列u200c、HPM6E8Y u200c系列等, HPM6E8Y 这个系列就是这家公司 2025 年 CES u200c最新一代机器人专用展览发布 MCU 专为关节控制和伺服电机提升而设计的u200c。HPM6E8Y 系列内置 RISC-V 主频高达双核 性能达到600MHz Mark3390Core ™具有基准测试成绩, 1710DMIPS 处理能力。HPM6E8与此同时Y 系列集成 2 个以太网 PHY 收发器,支持 EtherCAT 集成控制器 3 个 TSN 千兆以太网端口和 32 高分辨率的通道 PWM 支持毫秒级实时通讯和精确运动控制,适用于紧凑型伺服驱动系统。u200c
兆易创新 GD32F4 系列 MCU 和 GD32E5 系列 MCU,前者选用 Cortex - M4 主频达的核心 集成硬件240MHz DSP 指令集和浮点运算模块(FPU),如高精度电动机控制算法(例如 PID、FOC),适用于工业机器人伺服电机驱动; Cortex - M33 配备硬件三角函数加速器和高精度计时器的核心(180MHz),可以提高电机控制闭环运算的效率,有助于减少系统延迟。
除这三家公司外,纳芯微。 NS800RT 实时控制系列 MCU 同样值得关注,包括 NS800RT5039、NS800RT5049 和 单个主频分别为NS800RT3025 260MHz 和 200MHz 的 Arm Cortex - M7 支持分支预测的核心,DSP 指令集和 FPU。该系列产品可用于光伏。 / 储能逆变器,不间断电源,工业自动化,合作机器人,新能源汽车大型 / 纳芯微工作人员此前也透露过小三电、压缩机等功能,人形机器人是公司的实时控制。 MCU 市场定位的重要性。
当然,也有专门针对人形机器人电机驱动的芯片,比如芯朋微。该公司针对驱动无刷DC电机(BLDC)与微步进电机都推出了相关的专用芯片。其中,用于 BLDC 专用芯片可以实现电机的高效控制,具有集成度高、功耗低的特点,可以准确控制电机的转速、转换和扭矩距离;用于微步进的专用芯片可以实现电机的微步细分控制,提高电机的定位精度和运行稳定性。
人形机器人电机驱动的功率器件
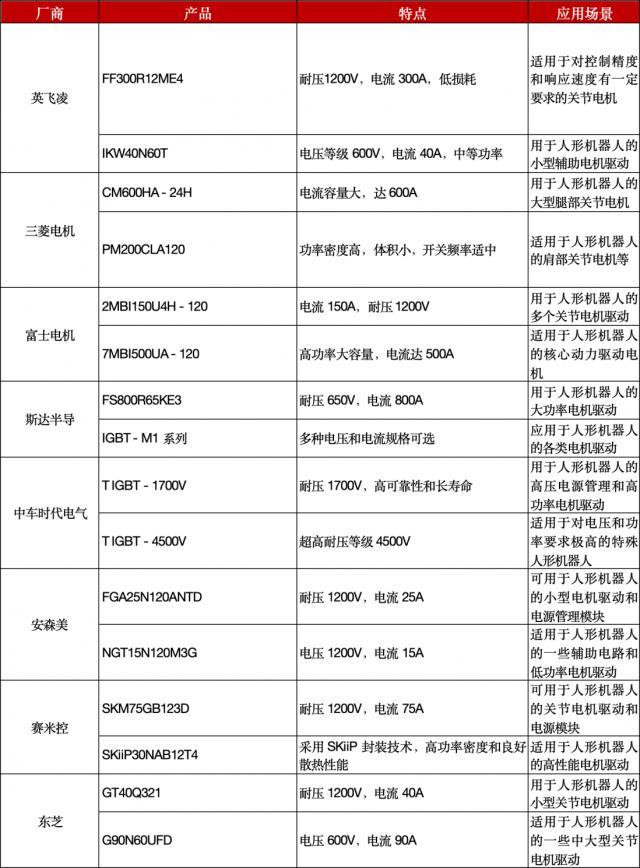
功率设备在电机驱动系统中也很重要。例如,相关数据显示,在人形机器人中,每台机电执行器通常需要 1 - 2 颗 IGBT 芯片驱动,可以快速开关,控制电动机的功率导出,实现电动机的高效驱动。
当然,由于人形机器人的最终用途不同,制造商正在选择 IGBT 芯片的质量可能会有所不同,比如工规级或者消费级,下面我们来看看一些有代表性的商品。
除了 IGBT,MOSFET 它广泛应用于人形机器人。MOSFET 在小型关节电机步进电机控制中,高频特性好,驱动功率小,导通电阻低,起着关键作用。例如,在小型关节电机中,MOSFET 可以组成 H 通过控制电机的正反转和转速,桥梁电路或半桥电路可以实现这些小关节的认知能力,如抓取物体、进行精细操作等。更具代表性的产品包括:

人形机器人电机驱动的编码器
最后,看看编码器。在人形机器人电机的驱动下,编码器可以为电机控制提供关键的反馈信息,从而实现精确的运动控制。具体来说,编码器主要实现三种功能:
首先是位置反馈。编码器可以实时监控电机轴的位置,并将位置信息反馈给电机控制器。控制器根据反馈的位置信息调整电机的驱动信号,使电机能够准确运行到目标位置,从而实现人形机器人各关节的准确定位和运动控制。
其次,速度反馈可以通过测量编码器输出脉冲的次数来计算电机的速度。根据速度反馈信息,电机控制器可以调节电机的驱动电流,保持电机的稳定速度,保证人形机器人的稳定流畅运动。
第三,闭环控制。编码器为人形机器人电机驱动系统提供闭环控制所需的反馈信息,使系统能够实时调整控制方法,补偿外界干扰和系统偏差,提高系统的控制精度和稳定性。
当前,人形机器人领域常用的一些编码器如图所示:

人形机器人电机驱动系统的后续发展趋势
当前,人形机器人市场仍处于发展初期,电动机驱动的用量无法与传统汽车、工业市场相比。数据表明,2024 中国人形机器人电机驱动市场规模 0.54 其中无框力矩电机规模为亿元 0.28 空心杯电机规模亿元, 0.26 亿元;预估 2025 中国人形机器人电机驱动市场规模 1.18 其中无框力矩电机规模为亿元 0.61 空心杯电机规模亿元, 0.56 亿元。
然而,随着人形机器人量产量指数的提高,电机驱动产品也将受益。那么,后续应用于人形机器人的电机驱动系统会有哪些发展趋势呢?我们总结了以下几点。
第一,随着应用领域对人形机器人动作精度要求的提高,电机控制需要达到更高的精度,精度更高。例如,在一些需要精确控制的任务中,如抓取易碎物品、协助微创手术等,要求电机能够精确控制扭距和位置。同时,为了使机器人运动更加自然流畅,快速避开障碍物或对外界刺激做出快速响应,电机的响应速度也会不断提高。例如,从接收到指令到开始运动的时间会缩短到毫秒甚至更短。
其次,集成和微型化。为了满足人形机器人对空间和重量的严格要求,电机控制硬件将越来越集成和微型化。集成电机、驱动器、传感器和控制器,形成高度集成的关节模块,减少线路和连接部件,提高系统的可靠性和紧凑性。
第三是和 AI 将深度学习、强化学习等人工智能算法紧密结合在电机控制中,使机器人能够根据环境和任务的变化独立学习和优化运动控制方法。例如,当机器人在不同的地形行走或执行不同的任务时,他们可以通过学习不断调整电机的控制参数来达到最佳的运动效果。
最后,多模态感知结合控制,结合视觉、力觉、触觉等传感器信息,实现多模态感知结合控制。比如机器人在抓取物体时,不仅可以通过视觉确定物体的位置和形状,还可以通过力觉反馈准确控制电机施加的力,防止过度或不足。
下一期,我们将系统地为您盘点一些人形机器人在传感器、产品和制造商方面的应用情况。
阅读更多热门文章
加关注 星标我们
把我们设为星标,不要错过每一次更新!

喜欢就奖励一个“在看”!
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com