
最后,机器人不需要帮助!上海交通大学最新运动控制结果发布




前几天,在央视元宵节晚会上,撒贝宁带着宇树机器人出现在舞台上。然而,随着机器人的进化速度,这种站不住、走路不利索的机器人的运动状态很快就会过去。

机器人前瞻 2 月 14 昨天,上海交通大学和上海人工智能实验室的研究人员发布了一份名为“ HoST "(Humanoid Stand-up Control)强化学习框架,可以使人形机器人从零开始学习各种真实场景,在任何地形上以不同的姿势快速站立。
HoST 框架结合多评判强化学习、平滑正则化和隐藏速度约束,让机器人学会自适应站立动作,通过内置速度限制,训练各种虚拟地形,将技能直接应用于现实世界中的机器人,实现流畅的运动控制,有效减少机器人在站立过程中遇到的震荡和强烈动作,保护硬件。
根据项目研究成员 TaouHuang 介绍,HoST 展示了以下特点:
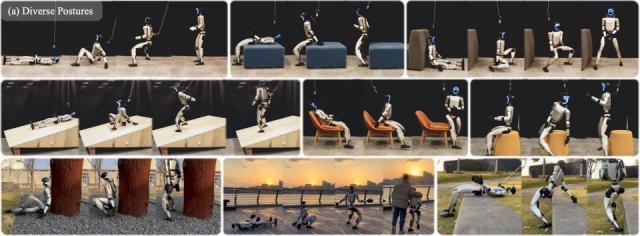
姿势多样化:团队采用的控制方法可以使机器人在不同的室外和室内环境中获得稳定的站立运动。
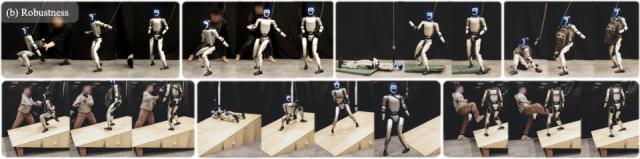
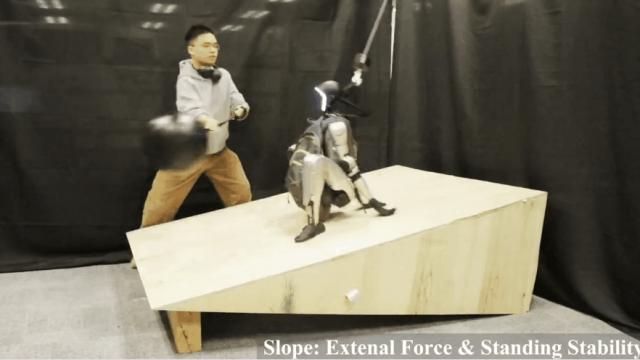
强鲁棒性:控制方法对外部世界的影响(如力、有效载荷、柔软的摔倒物和随机扭距丢失)显示出极强的鲁棒性。
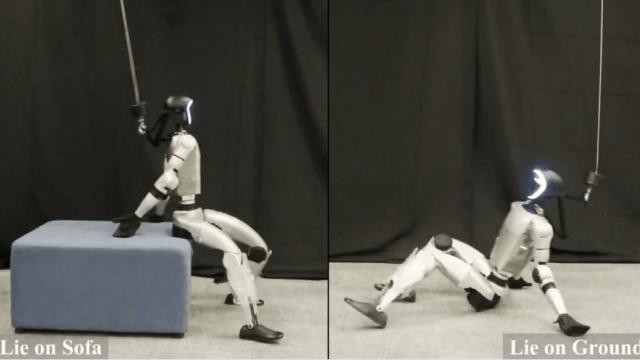
紧急情况下的站立技能:具有摔倒恢复、稳定平衡、站立稳定等功能。

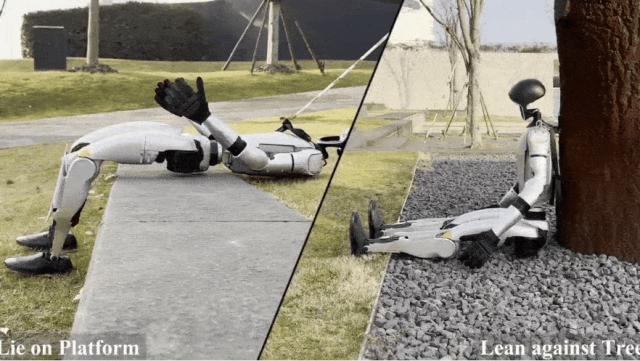
团队在宇树 G1 这种强化学习框架在人形机器人身上得到了验证,例如,机器人可以在全身躺在地上后迅速站起来。
在户外环境中,机器人可以扭动膝盖,快速站起来,无论是躺在台阶上,靠在树上,还是躺在铺满石头的路上和草坪上。

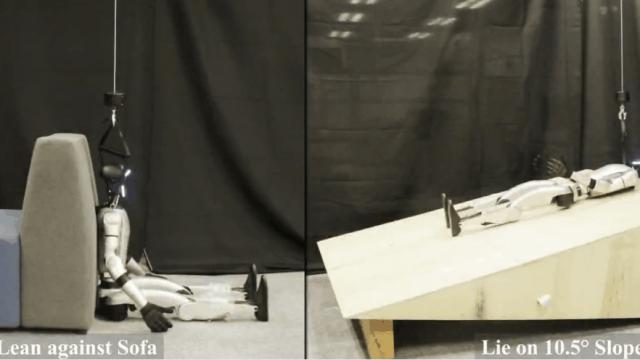
在沙发、地板、斜坡、垫子等不同的室内环境中,机器人站起来的动作还是很干净的,从坐着、靠着到躺着。

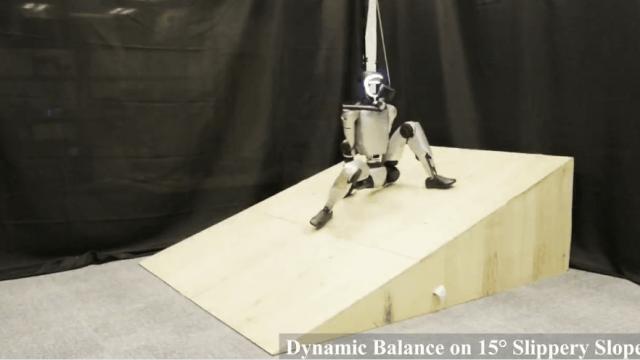
机器人在稳定平衡方面也表现出色,从斜坡上站起来后仍能保持稳定,同时移动。
该团队还测试了机器人在重量状态和影响状态下的站立状态。即使你背负着。 6 千克的大背包,被测人员用其他物体影响,机器人站起来也不费力气。

HoST 框架的提出,有效地解决了过去忽视硬件限制、依赖预设轨迹的问题。利用从零开始的强化学习,HoST 可以学习各种地形姿势的自适应站立动作,保证从模拟到现实的有效转移。该团队还提到,这一结果为将站立控制整合到当前的人类系统奠定了基础,现实世界中的适用性将进一步扩大。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com