
激光雷达的第一个国家标准已经持续了四年!和赛、华为、速腾聚创参与拟定。





电子爱好者网报道(文章 / 梁浩斌)车载激光雷达领域的第一个国家标准来了!五一假期前 4 月 25 日本,国内首个国家级车载激光雷达标准《车载激光雷达性能要求及测试方法》GB/T 45500 — 2025 正式发布。
该标准由工业和信息化部提出,2021 2023年开始预研, 年 3 每月正式批准项目。国内50多家主要激光雷达制造商、汽车制造商和智能驾驶公司参与制定这一标准,包括和赛、华为、速腾聚创等。,还有法雷奥、莱茵技术、大众汽车、福特汽车等海外或合资企业。
车载激光雷达的性能要求和测试方法(以下简称《方法》)规定了车载激光雷达的性能要求、测试方法和测试规则。该标准适用于激光雷达,用于道路车辆的外部信息感知,可以参考其他激光雷达。然后我们来简单解释一下这个标准文件的重要内容。
车载激光雷达性能要求
第一,对激光雷达而言,有几个关键的性能参数,包括测距能力、测距精度、视场角度、反射特性精度等。
《方法》规定,激光雷达的最远探测距离不得小于标称值,近期探测距离不得大于标称值。
在距离精度和距离精度方面,激光雷达在标称测距范围内各视场区域的距离精度 ( σ d ) 应满足 σ d ≤ max ( 0.1m,0.25%S ) ,距离准度 ( δ d ) 应该满足平方根 | δ d| ≤ max ( 0.2m,0.5%S ) ,其中 S 对于当前的探测距离值。
这里的精度是指在一定的测量环境下,在一定数量的测量中,每个测量值之间的离散程度;精度是指在一定的测量环境下,测量值的平均值与一定数量的真实值之间的偏差程度。
精确度反映了反复测量结果的稳定性,但并不一定意味着与实际值一致;精确度反映了测量结果的准确性。
水准 / 精度等级的垂直角度≤ 0.1 °,视角准度≤ ± 0.2 °;视野角度要求水平 / 竖直视场角≥标称值,漏验角≤标称值。
需要满足反射特性的精度:不同反射目标物体的误差≤ 10%(10% 反射板)、≤ 15%(50% 反射板)、≤ 30%(90% 反射板和 V 类反光贴)。
另外,激光雷达还规定点云在单漫反射板上(漫反射板与激光雷达之间的距离要大于 5 m)与双漫反射板(前漫反射板与激光雷达之间的距离 > 5 m,且两板间距 > 4 m)场景中不得有拖点。
与此同时,《方法》要求激光雷达的启动时间(从通电到导出第一点云)小于或等于 40s;点频和帧数要求大于或等于标称值。 99.9%。
由于车载激光雷达的工作环境比较苛刻,比如安装在车身外的激光雷达,需要面对震动、高温日晒、碎石等恶劣环境,所以对环境适应性提出了更高的要求。环境适应性要求包括以下六个要点。
功能状态:试验中有效点云相对丢点率 ≤ 20%,丢包率 ≤ 5%;测试结束后需要满足距离精度、精度和点频 / 帧频要求。
电气性能:检测包括电压波动、过压、反向电压、抛载、短路保护等,确保供电稳定。
机械性能:振动、冲击、碎石冲击(窗口表面损坏面积 ≤ 0.2%)、耐磨性,线束拉脱力试验。
防尘防水:乘客舱外 6K7/IPX9K;乘客舱里 车顶激光雷达不适合IP5K2 IPX7)。
环境耐候性:高低温储存 / 检测工作、温度循环、寒湿循环、盐雾、太阳辐射、化学负荷等。
电磁兼容:静电放电抗扰性,传导 / 无线电骚扰的辐射抗扰特性必须符合 GB/T 18655 — 2025。
核心测试方法
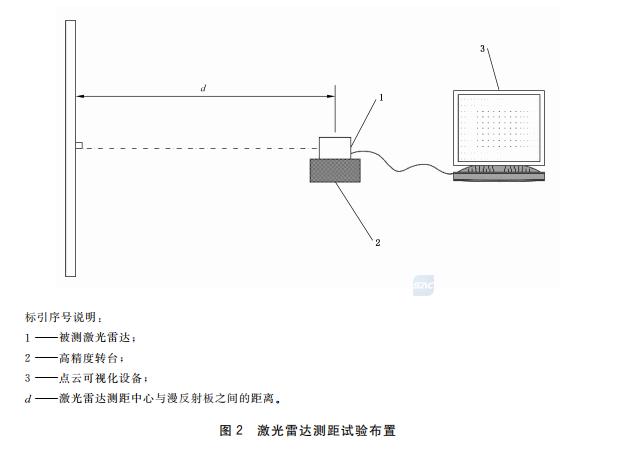
该方法对测试环境有具体要求。测试环境是在高精度转台上安装激光雷达,并添加大型漫反射板。实验中使用的激光雷达的高精度转台视角精度不得超过 0.02 °,视角度准确度不得超过 ± 0.02 °。
对激光雷达的视场区域进行划分,在测量最远探测距离时,使用 10% 反射漫反射板(大小)≥ 2.4m × 2.4m),使用转台绕测距中心旋转激光雷达,选择激光雷达。视场区域的任何位置都面向漫反射板的核心,并记录不少于一段时间的持续时间 100 帧点云。并且逐步增加距离,记录视场区域内检测概率。(POD)≥ 50% 的最大值。
采用高精度转台测量点云数据的距离精度和准度,计算平均值和标准差;视角精度的使用 90% 反射板(倾斜) 10 °± 2 °),计算水准 / 垂直角度误差标准差;角度反射器用于视角准度,顶点坐标误差由转台旋转测量;当目标边缘消失时,视场角度通过旋转转台记录。计算视角;反射特性是使用不同的反射板(10%/50%/90%) 以及反光贴)检测反射值的精度;抗干扰性检测是在光学暗室中对射两个激光雷达,统计虚点率。
那怎样计算通过国家标准呢?现行的检测规则是一次抽样方案,抽样 8 各组样品各自进行功能性能,电负荷,温度 / 寒冷潮湿,机械冲击,振动,保护等级,EMC、耐久性等实验。所有项目都通过了;任何不合格项目都需要翻倍复查,如果仍然不合格,则判断不合格。
里程碑激光雷达行业
近年来,随着高级辅助驾驶渗透率的快速提高,高级辅助驾驶的普及也推动了激光雷达的广泛上车。事实上,激光雷达只用了三四年就真正大规模上车了。技术路线依然鲜花盛开,行业还没有统一出最好的解决方案,所以过去没有统一的行业标准。
2021 2008年是激光雷达大规模上车的第一年,《车载激光雷达性能要求及测试方法》的国家标准也是从 2021 2008年开始准备预研,对应行业发展阶段。该标准首次明确了车载激光雷达的检测性能(例如测距能力、距离精度、视角分辨率)、环境适应性(如高低温、寒湿、盐雾)、电磁兼容性等核心指标结束了行业内技术标准分散、测试方法不统一的局面,避免了“虚假广告”或“低质量竞争”,提高了行业的透明度。
与此同时,激光雷达国家标准的推出也明确了目前市场上车载激光雷达产品的门槛,设定了最低水平,淘汰了落后产能。为企业创新提供标准化的测试方法和更高的标准,更快地验证产品特性,促进激光雷达制造商在不同的技术指标上迭代优化。
作为中国最大的车载激光雷达市场,《车载激光雷达性能要求及测试方法》的推出,意味着激光雷达产业不仅可以通过标准化促进产业链的协同发展,还可以引领中国。 ISO/PWI 国际标准13228《道路车辆激光雷达测试方法》提供参考,在全球智能驾驶领域,中国激光雷达产业有望占据更加核心地位。
阅读更多热门文章
加关注 星标我们
把我们设为星标,不要错过每一次更新!

喜欢就奖励一个“在看”!
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com