
小鹏预研众包建图,或者是全场景智驾。 Plan B






就像理想和极氪一样,小鹏计划今年将智能驾驶推向 L3 等级,但不同的是,小鹏准备了两个方案。
未来小鹏智能驾驶的明确路线也是基于大模型的无图方案。但是,在下一代大模型还没有完全成熟的时候,作为一个过渡,特定场景的绘图方案又变成了一个可选的选项。
这条曾经被抛弃的技术路径“众包建图”,很可能应该以另一种方式回归。
01.两套方案
我们独家了解到,小鹏已经在内部开始了众源绘图技术的开发,目前已经推进了几个月。这项技术现在处于预研状态,未来可能是小鹏。 L3 补充等级方案。
中源地图是一项用于提高智能驾驶策略的技术。它通过车辆收集道路数据,即时构建导航地图。中源地图有两个特点。一是多车协同,多源数据采集,二是地图即时生成,动态更新。中源地图可以为智能驾驶提供全局路径的参考,使智能驾驶系统可以获得的信息可以延伸到传感器的覆盖范围之外。
理想、极氪、元戎启动、地平线等相继进入。 VLA 路线之后,小鹏将采用哪种技术路线来解决当今大模型的问题,实现 L3 等待高级智能驾驶,一直受到外界的关注。
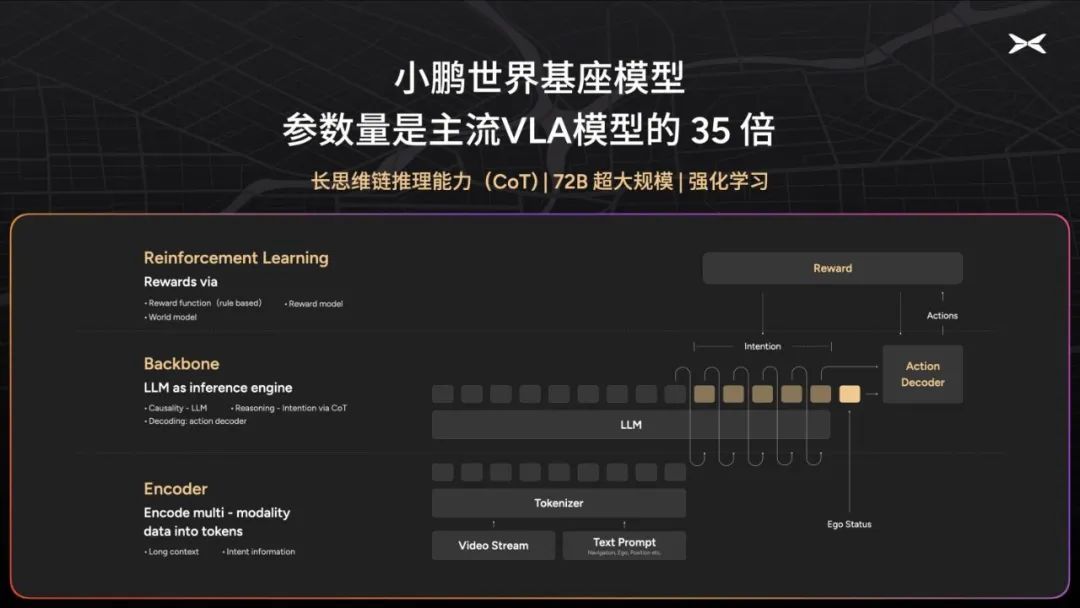
4 月 14 日本,小鹏在香港举行了一次。 AI 第一次披露技术分享会 “小鹏世界底座模型”。这个模型可以和端到端大模型的下一代相比。不同的是,它被改成了以大语言模型为骨干网络,这与理想和元戎正在开发的模型有关。 VLA 大型模型相似,但参数较大。也就是说,未来小鹏智驾的明确方向,仍然是以无图路线为基础的大型模型方案。
对于预研众源建图,小鹏官方回复称“小鹏汽车智能驾驶将坚持无图。 “大模型路线”, 使用众源建图技术是不真实的。
一位熟悉小鹏技术路径的智能驾驶行业从业者告诉我们,小鹏对众源绘图技术的预研很可能是针对当前的。 XNGP 补充方案。
目前小鹏的下一代大模型刚刚完成路径验证,距离完善可用还有很长的路要走。在这个过渡阶段,中源地图有实力填补。 AI 公园、停车场等内部道路的决策能力不足,有望让基于 XNGP 的 L3 高级智能驾驶方案实现可用性更快。
今年 3 月 23 日本,董事长何小鹏在社交平台上透露,小鹏 “估计(今年)下半年将实现 L3 等级全场景自动驾驶”。同样的推断是理想和极氪,他们做到了。 L3 所有的时间估计都在今年之内,一场智驾头部玩家的新技术竞争开始了。
小鹏车端 XNGP 目前使用的端到端大模型包括感知模块 XNet、规划模块 XPlanner 大语言模型 XBrain 三部分,虽然也融入了大语言模型,但并非骨干。
小鹏这套 XNGP 该方案可以在外部道路上实现大部分场景的辅助驾驶,但在一些特殊情况下,如内部道路,可能会遇到麻烦。与外部道路相比,内部道路的建设更加不规则,道路标志也更加不规则,这也是特斯拉。 FSD 曾经遇到的问题。
对小鹏来说,如果众源建图能够弥补特定的场景,比如内部道路,小鹏可以基于现在的情况。 XNGP 计划,拓宽其实现 “全场景自动驾驶” 在许多场景中,范畴更早地实现。 L3。
小鹏的第一步是先将众源建图数据的收集、回传等能力埋在一些车型上,这是通过的。 OTA 你可以做到。中源地图需要一定数量的数据作为调整和优化功能的基础。在此期间,中源地图不能在智能驾驶计划中发挥实际作用。
现在正式版的小鹏智驾是去年 10 天玑在月底推送 5.4.0。今年 1 月 9 日,小鹏官宣开启天玑。 XOS 5.5.0 这个版本的品尝升级,增加了从停车位到停车位的功能。小鹏相对完整的众源建图技术,预计将在两到三个版本之后推送。
02.智驾终局前的赛跑
许多汽车公司都想做到 由于他们的判断,L3 L3 是 L4 不是时代的开始 L2 随着等级智能驾驶的延续,由于技术路径将变得清晰,智能驾驶的竞争将接近终局。
L2按行业对智能驾驶的一般分类, 级智驾驶的驾驶责任总是在人们身上,而到了 L3 在这个阶段,智能驾驶系统可以在特定的条件下完全接管汽车的驾驶,也就是覆盖整个场景,并且有能力承担一定的责任。到了 L4,大多数路况都可以交给智能驾驶系统,甚至有些特殊用途的汽车可以去掉方向盘。
尤其需要指出的是,上述描述仅限于技术能力层面,实际责任划分是法律问题而非技术问题。
小鹏曾经是高精度地图 在智能驾驶技术路径上进行规范和控制的领导者,但是这个方案之后被称为误解, 2023 年初,主流玩家转向端到端大模型的练习,利用人工智能进行智驾。
中源地图建设在智能驾驶领域并不是什么新鲜事。当初放弃高精度地图的原因是采集困难,无法实时更新。当时有业内人士提出引入中源地图,让客户和车辆在路上跑,帮助更新导航地图,低成本处理地图新鲜度的问题。
但是它并没有成为主流。在过去的几年里,主流玩家集中精力训练大型模型,脱离高精度地图。 “无图” 该计划被用作智能驾驶领先水平的标志。
随着纯视觉方案的完善,业内人士曾经认为,中源绘图技术的发挥空间会逐渐减少。然而,当端到端方案需要向更高层次进步时,问题又出现了。
如今,无论是华为、理想、小鹏还是特斯拉,他们训练的端到端大模型都可以解决驾驶决策中的大部分问题,但仍然存在一些不可预测的问题,这是目前大模型无法企及的。无论智能驾驶计划如何, L2 被描述为 L2 、L2 ,永远无法跨越 长尾问题带来的隐患伴随着L3。
理想,极氪转向下一代大模型 VLA 练习,将多模态模型内化为端到端智能驾驶模型的一种能力,试图让智能驾驶模型内化。 AI 具备复杂思考和深度推理的能力,进而有实力实现更复杂的驾驶决策。我们曾经独家透露,理想已经在今年年初开始了。 VLA 大型封闭式开发,项目有望在今年下半年实施。
比如前面提到的内部道路,VLA 大型模型可以通过推理来理解道路和特殊标志,这是目前大型模型所难以实现的,也是众源建图可以帮助解决的场景之一。
现在是从小鹏公布的 “世界底座模型” 看来,小鹏也转向了 VLA 众源建图只是下一代大模型研发的过渡方案。
智能化驾驶是近年来头部新能源汽车企业的竞争焦点,从 NOA 从开城到端到端,再到今年。 L3 ,每一年都有一个阶段性的新节点,小鹏从未跌出第一梯队。现在看来,这场比赛很可能在接下来的一两年里就要结束了。
本文来自微信微信官方账号“汽车像素”,作者:邢芮芳,编辑:冒诗阳,36氪经授权发布。
本文仅代表作者观点,版权归原创者所有,如需转载请在文中注明来源及作者名字。
免责声明:本文系转载编辑文章,仅作分享之用。如分享内容、图片侵犯到您的版权或非授权发布,请及时与我们联系进行审核处理或删除,您可以发送材料至邮箱:service@tojoy.com